We are digital creatives crafting custom made interactive experiences for creatives.




We have a hotline for creative agencies ☎️
We have ear for creatives who have crazy ideas that need technical validation and implementation. We can build the unimaginable and have a wide variety of expertise.
Creative Development
Web development
WebGL
Interactive screens
AR / VR
Augmented Reality
Virtual Reality
WebAR
3D Design
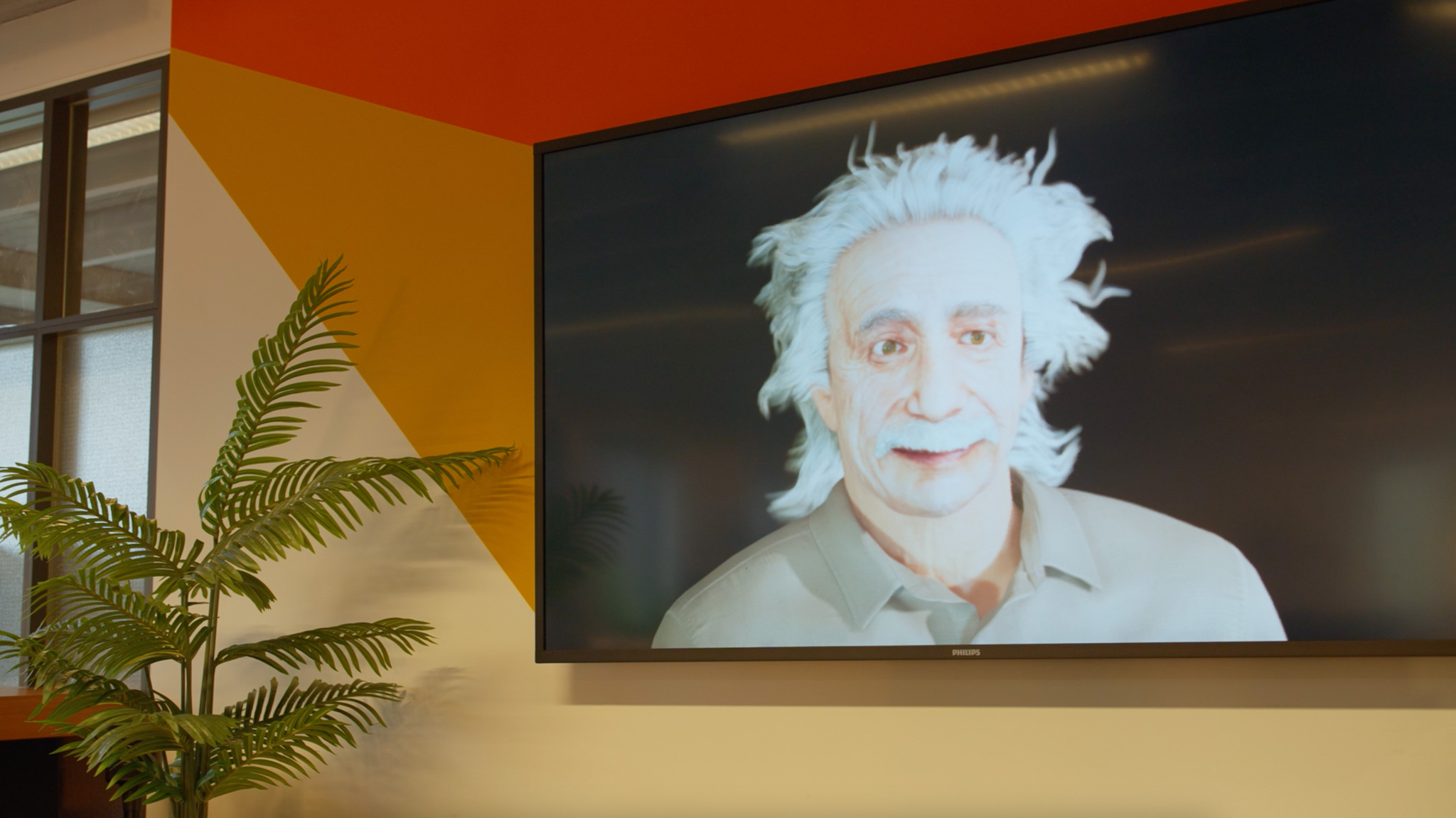
Artificial Intelligence
Machine Learning
Deep Learning
Computer Vision
NLP


Let's talk 👋
Contact Us
Let's talk 👋
Contact Us
Let's talk 👋
Contact Us
Let's talk 👋
Contact Us
Veldkant 33A
2550 Kontich, Belgium
Work
Follow Us
10%
41%
64%
86%
100%